HOME >
注目商品 >
IHはんだ付け装置株式会社スフィンクス・テクノロジーズ製
IHはんだ付け装置株式会社スフィンクス・テクノロジーズ製
新しいモノづくりを求めていませんか?
答えは、触れない「IHはんだ装置」です。
Technologies
高い加熱能力を自在に制御
- 周辺への影響を抑えて加熱
- 数ミリの大きなモノを早く、コンマ数ミリの小さなモノを繊細に

Safety
非接触で安全・高品質・簡単メンテナンス
- はんだ付け後のワーク温度低下が早くオペレータに優しい
- はんだボールの発生を抑え、定量はんだで仕上がりを美しく

Environment
カーボンニュートラル
- はんだごみレスで、CO2を大きく削減
- 高い加熱効率で電気代を節約
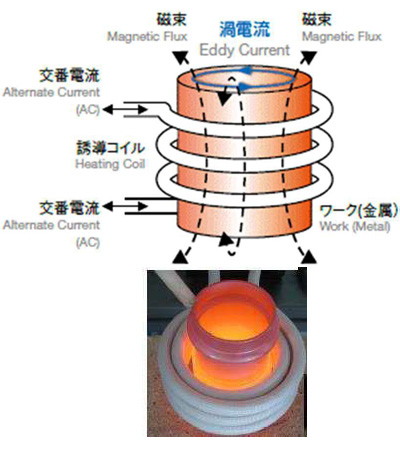
IH(誘導加熱)とは

- (1)ヘッドコイルに交流電流を流す。
- (2)ヘッドコイルから磁束発生。
- (3)磁束とワークが鎖交する。
- (4)鎖交部分に過電流が発生。
- (5)ジュール発熱。
- (6)昇温
IH(Induction Heating)は非接触かつ直接的に金属を加熱するため、エネルギー削減を最大化できる加熱方式です。
IH(誘導加熱)の特徴
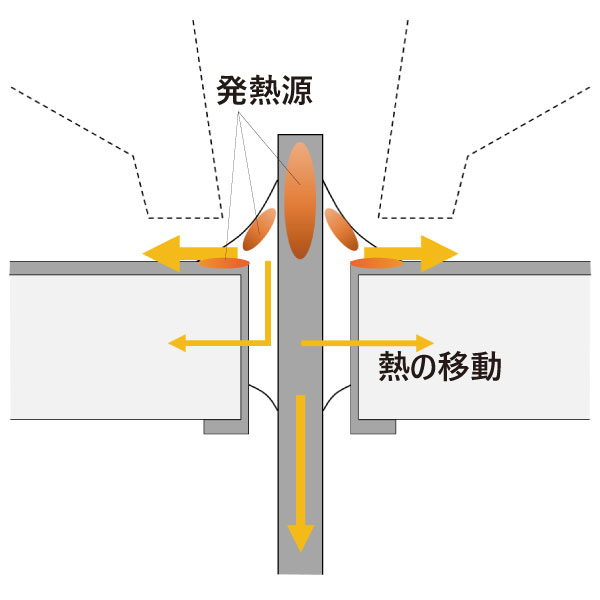
- 被加熱物に触れずに加熱することが可能
- 自己発熱による熱の移動がない
- 熱損失が少ない
- 単位時間当たりのエネルギーが大きい
- エネルギー源は電気(CO2レス)
IH(誘導加熱)はんだ付け装置
部分DIP、手はんだ等の後工程をターゲットとする。
製品構成

はんだ付けの課題
IH(誘導加熱)はんだ付けはどんな課題を解決できるのか?
- 課題例
- はんだごてでははんだが溶けにくい、時間がかかる
急速加熱により短時間ではんだを溶かせる。
- 各PINではんだ仕上がりが異なる
熱伝導率が異なるPINのはんだ付けを1PINごとに最適加熱ではんだ付けが可能。
- はんだごてからの熱伝導ばらつきによる不良
金属の自己発熱による安定したフィレット形状
- 対象部品例
- IGBT
- 平板端子
- コネクタ
- 厚銅ピン
- Etc…

FAシリーズ
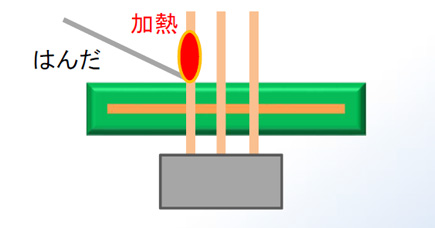
上から非接触IHはんだ
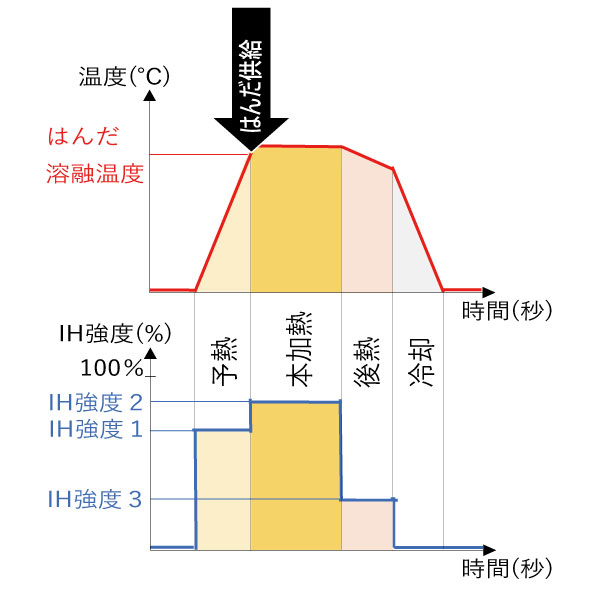
基板パターンや端子等、最適なプロファイルを個別に実現できます。加熱しながら磁気集中器が水平移動することで、平角端子やパッドを均一加熱できます。ワーク上部ではんだを溶融させ、そのはんだの球を接合部に近付け、はんだの熱を利用してワークになじませます。ワークへの直接的な熱影響を抑制できるため、熱に弱いワーク(フレキ基板など)のはんだ付けに適しています。
S-WAVE301 FA 機能表
設定メモリ
- プログラム
- 50パターン
- はんだ付けポイント
- 290箇所(1プログラム毎に)
- IH条件
- 100種
- はんだ供給条件
- 100種
ロボット(150X150タイプ)
- 分類
- 4軸直交ロボット(X・Y・Z・θ)
- 可動域 X軸
- 0~150mm
- 可動域 Y軸
- 0~150mm
- 可動域 Z軸
- 0~150mm
- 可動域 θ軸
- 0~359.9deg
- はんだ供給ユニット
- J-CAT FEEDER(アポロ精工)はんだ径φ0.3~1.6
- 外形(W×H×D)
- 480×770×510
ロボット(300X300タイプ)
- 分類
- 4軸直交ロボット(X・Y・Z・θ)
- 可動域 X軸
- 0~350mm
- 可動域 Y軸
- 0~300mm
- 可動域 Z軸
- 0~100mm
- 可動域 θ軸
- 0~±180deg
- はんだ供給ユニット
- J-CAT FEEDER(アポロ精工)はんだ径φ0.3~1.6
- 外形(W×H×D)
- 850×830×930
磁気集中ヘッド
- コイル定格電流
- 150A(波高値)
- 発振周波数
- 750~1100kHz
- 加熱可能ワーク幅
- 0.3~1.5
システム
- 入力電圧
- AC 100~240V 50/60Hz 1φ
- 最大入力電力
- インバータ340W 制御170W ※消費電力ではありません
FBAシリーズ
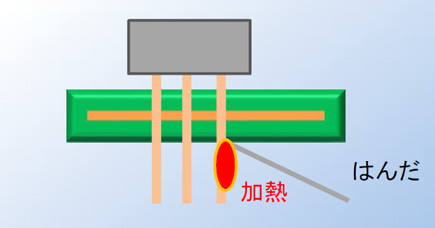
ロ-ダ/アンローダ搭載下から非接触IHはんだ
異形部品挿入機、本機、検査装置を1ラインとして連動させることで、はんだ後工程のインライン化に貢献します。従来までの半自動ポイントはんだ工程を、インライン化することにより、より効率的な生産環境を提供いたします。さらには、ローダの搬送幅を自動で切り替える機能を備えており、上位通信による頻繁な品種切換に対応するなど、多品種生産への対応もサポートします。
※弊社では異形部品挿入機および検査装置の提供は行っておりません。
S-WAVE301 FBA 機能表(最大400X500 可変幅搬送)
設定メモリ
- プログラム
- 50パターン
- はんだ付けポイント
- 290箇所(1プログラム毎に)
- IH条件
- 100種
- はんだ供給条件
- 100種
ロボット
- 分類
- 4軸直交ロボット(X・Y・Z・θ)
- 可動域 X軸
- 0~600mm
- 可動域 Y軸
- 0~500mm
- 可動域 Z軸
- 0~75mm
- 可動域 θ軸
- 0~±180deg
- ワーク搬送
ローダ・アンローダ - 精度ピンによるプリント基板位置決め機能
- はんだ供給ユニット
- はんだ径φ0.3~1.6
- 外形(W×H×D)
- 480×770×510
磁気集中ヘッド
- コイル定格電流
- 150A(波高値)
- 発振周波数
- 750~1100kHz
- 加熱可能端子サイズ
- 0.3~1.5
システム
- 入力電圧
- AC 200V 50/60Hz 1φ
- 最大入力電力
- 1000W/1200W
装置サイズ
- 外形 W×H×D [mm]
- 1200×1200×1650
製造:株式会社スフィンクス・テクノロジーズ
日本経済新聞での記事掲載