HOME >
注目商品 >
IHはんだ付け装置株式会社スフィンクス・テクノロジーズ製
IHはんだ付け装置株式会社スフィンクス・テクノロジーズ製
新しいモノづくりを求めていませんか?
答えは、触れない「IHはんだ装置」です。

Technologies
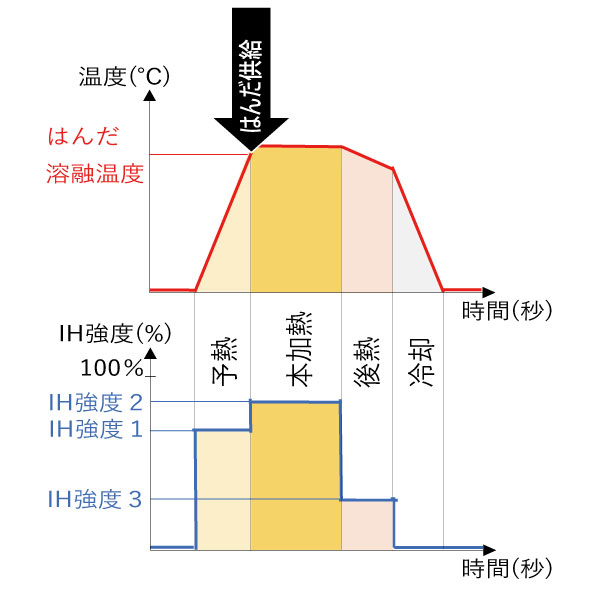
高い加熱能力を自在に制御
- 周辺への影響を抑えて加熱
- 数ミリの大きなモノを早く、コンマ数ミリの小さなモノを繊細に
Safety
非接触で安全・高品質・簡単メンテナンス
- はんだ付け後のワーク温度低下が早くオペレータに優しい
- はんだボールの発生を抑え、定量はんだで仕上がりを美しく

Environment
カーボンニュートラル
- はんだごみレスで、CO2を大きく削減
- 高い加熱効率で電気代を節約
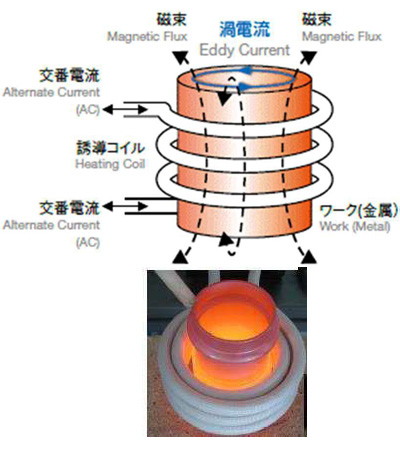
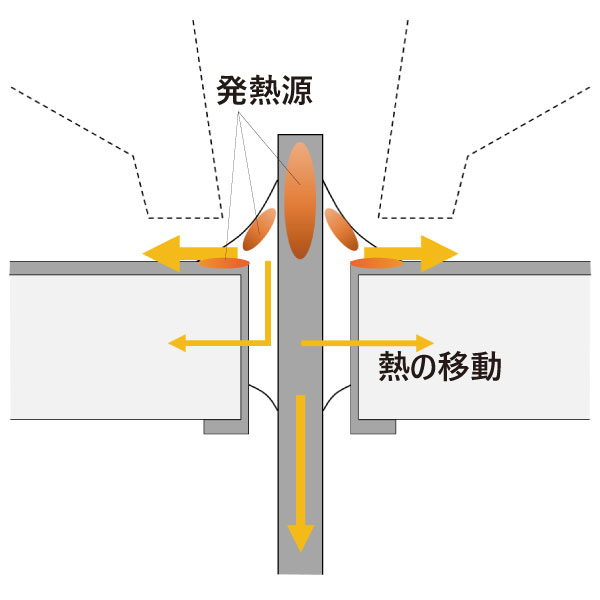
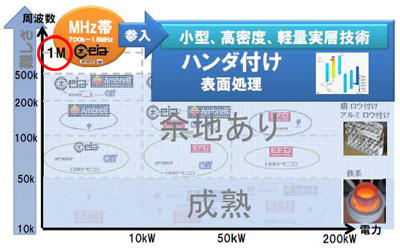
IH(誘導加熱)とは

- (1)ヘッドコイルに交流電流を流す。
- (2)ヘッドコイルから磁束発生。
- (3)磁束とワークが鎖交する。
- (4)鎖交部分に過電流が発生。
- (5)ジュール発熱。
- (6)昇温
IH(Induction Heating)は非接触かつ直接的に金属を加熱するため、エネルギー削減を最大化できる加熱方式です。
IH(誘導加熱)の特徴
- 被加熱物に触れずに加熱することが可能
- 自己発熱による熱の移動がない
- 熱損失が少ない
- 単位時間当たりのエネルギーが大きい
- エネルギー源は電気(CO2レス)
IH(誘導加熱)はんだ付け装置
部分DIP、手はんだ等の後工程をターゲットとする。
製品構成

はんだ付けの課題
IH(誘導加熱)はんだ付けはどんな課題を解決できるのか?
- 課題例
- はんだごてでははんだが溶けにくい、時間がかかる
急速加熱により短時間ではんだを溶かせる。
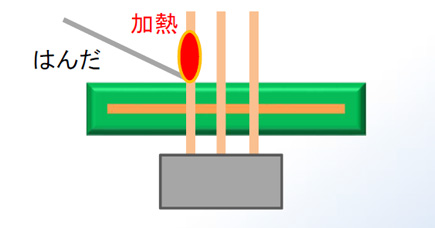
- 各PINではんだ仕上がりが異なる
熱伝導率が異なるPINのはんだ付けを1PINごとに最適加熱ではんだ付けが可能。
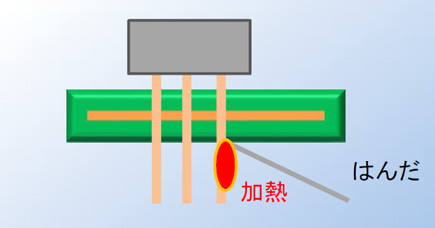
- はんだごてからの熱伝導ばらつきによる不良
金属の自己発熱による安定したフィレット形状
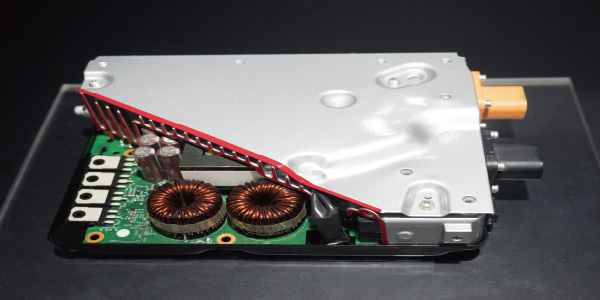
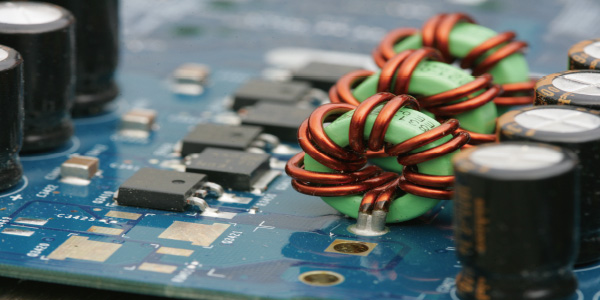
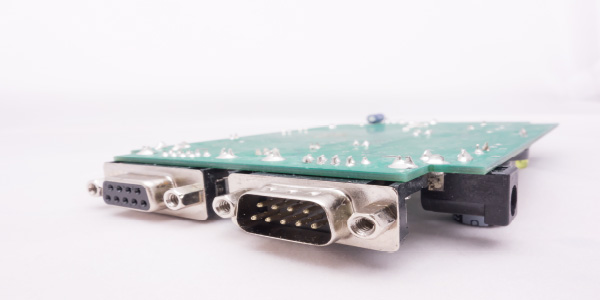
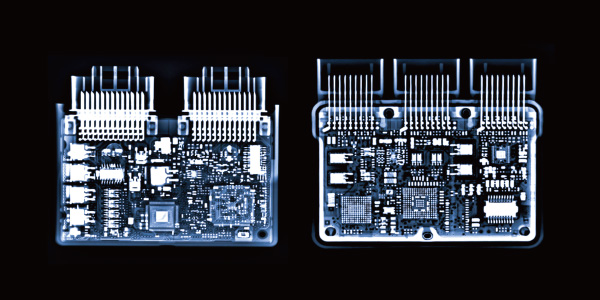
- 対象部品例
- IGBT
- 平板端子
- コネクタ
- 厚銅ピン
- Etc…
S-WAVE301 FA 機能表
設定メモリ
- プログラム
- 50パターン
- はんだ付けポイント
- 290箇所(1プログラム毎に)
- IH条件
- 100種
- はんだ供給条件
- 100種
ロボット(150X150タイプ)
- 分類
- 4軸直交ロボット(X・Y・Z・θ)
- 可動域 X軸
- 0~150mm
- 可動域 Y軸
- 0~150mm
- 可動域 Z軸
- 0~150mm
- 可動域 θ軸
- 0~359.9deg
- はんだ供給ユニット
- J-CAT FEEDER(アポロ精工)はんだ径φ0.3~1.6
- 外形(W×H×D)
- 480×770×510
ロボット(300X300タイプ)
- 分類
- 4軸直交ロボット(X・Y・Z・θ)
- 可動域 X軸
- 0~350mm
- 可動域 Y軸
- 0~300mm
- 可動域 Z軸
- 0~100mm
- 可動域 θ軸
- 0~±180deg
- はんだ供給ユニット
- J-CAT FEEDER(アポロ精工)はんだ径φ0.3~1.6
- 外形(W×H×D)
- 850×830×930
磁気集中ヘッド
- コイル定格電流
- 150A(波高値)
- 発振周波数
- 750~1100kHz
- 加熱可能ワーク幅
- 0.3~1.5
システム
- 入力電圧
- AC 100~240V 50/60Hz 1φ
- 最大入力電力
- インバータ340W 制御170W ※消費電力ではありません
日本経済新聞での記事掲載